
- 과학향기 Story
- 스토리
스토리
우주로봇의 손가락은 일곱 마디!?
<KISTI의 과학향기> 제733호 2008년 03월 17일
스푸트니크 1호가 우주개발의 신호탄을 올린 지 50년이 지났다. 미지의 영역이었던 우주를 이해하고 탐사하기 위한 여러 기술도 끊임없이 발전했다. 우주 공간은 생명체가 살 수 없는 위험천만한 곳이다. 인간이 직접 닿을 수 없는 곳을 탐사하고, 우주선을 수리하는 등의 작업에 우주로봇이 활약하고 있다.
우주로봇이라고 하면 화성 표면을 탐사하는 스피릿(Spirit)과 오퍼튜니티(Opportunity) 같은 탐사로봇이 떠오를 것이다. 하지만 이에 못지않게 큰 역할을 담당하는 우주로봇이 있으니 바로 로봇 팔이다. 사람이 직접 하기에 위험한 일을 처리해 내는 로봇 팔에 대해 알아보자.
우주에서 로봇 팔을 처음 사용한 시기는 1981년으로 거슬러 올라간다. 로봇 팔은 무거운 물체를 들어 올리거나 우주선에 발생한 고장을 수리하기 위해 우주왕복선 콜롬비아호에 처음 장착됐다. 캐나다에서 제작돼 ‘캐나담(CANADARM)’이라는 이름이 붙여졌다.
허블망원경을 수리하는 프로젝트로 캐나담은 일약 스타가 됐다. 콜롬비아호는 수명이 다해가는 허블망원경에 접근해 캐나담으로 허블망원경을 붙잡은 뒤 고정시켰다. 우주인들은 우주유영을 통해 허블망원경의 카메라를 교체해 시야 2배, 선명도 2배, 감광도 5배 뛰어난 성능을 발휘하도록 업그레이드했다. 허블망원경의 심장부인 전력통제장치도 교체했고, 낡은 태양전지판도 새것으로 교체했다.
캐나담은 인공위성을 수리하는 역할도 담당했다. 1985년 우주왕복선에서 우주로 방출된 인공위성이 잘못된 궤도로 진입했다. 로켓을 작동시키는 스위치가 켜지지 않았기 때문이었다. 콜롬비아호는 로봇 팔로 인공위성을 회수해 고장을 수리한 뒤 정상 궤도에 진입시켰다. 캐나담의 활약 덕에 인공위성이 살아난 것이다.
우주왕복선 자체의 결함을 발견할 때도 캐나담의 활약은 돋보였다. 1984년 우주왕복선이 12번째 우주비행을 했을 때 밑바닥에 설치된 환기구 구멍에 얼음이 붙어있는 것을 발견했다. 대기권에 진입할 때 이 부분이 떨어진다면 안전에 심각한 문제를 일으킬 수 있어 얼음을 제거해야 했다. 로봇 팔로 이 부분을 살살 두드려 얼음을 제거했다.
자체 결함을 수리하는데 로봇 팔의 효용성이 입증되자 2003년 콜롬비아호 폭발 사고 이후에는 로봇 팔 길이를 150cm 연장했다. 끝부분에 카메라와 머리카락정도의 물체도 식별할 수 있는 매우 정교한 레이저 측정 장비도 부착해 지구에 귀환하기 전 의무적으로 왕복선 밑바닥을 검색하도록 했다(그림01). 하지만 ‘손’에 해당하는 부위가 없어 정교한 작업을 하려면 우주인이 로봇팔의 끝에 매달려 우주유영을 해야 했다(그림02).
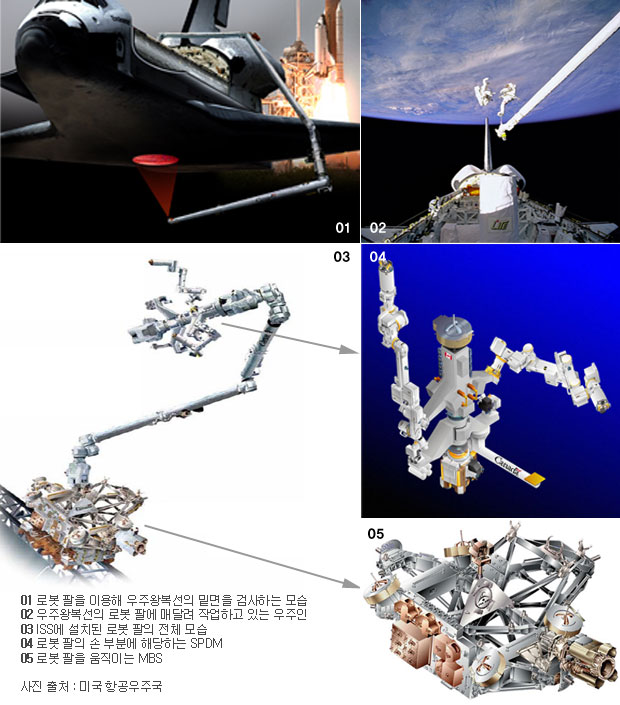
한편 국제우주정거장(ISS)에는 우주왕복선의 로봇 팔보다 기술적으로 더 향상된 로봇 팔이 설치돼 있다(그림03). 2001년에 설치된 이 로봇 팔은 길이 17.6m, 무게 1800kg에 이르는 거대한 팔이다. ISS의 트러스를 레일 삼아 움직이면서 최대 100톤의 물체를 조작할 수 있다.
ISS의 로봇 팔은 크게 세 부분으로 나뉜다. 트러스와 고정돼 로봇 팔을 이동시키는 ‘MBS’(Moving Base System, 그림05), 팔에 해당하는 ‘캐나담2(CANADARM2)’, 손에 해당하는 ‘SPDM’(Special Purpose Dexterous Manipulator, 그림04)이 그것이다. 이중 SPDM은 가장 최근에 결합됐다. 3월 11일 우주왕복선 엔데버호는 로봇 팔의 마지막 부분인 SPDM를 싣고 우주로 올랐다.
이번에 설치된 SPDM은 거대한 로봇 팔에서 손 역할을 하게 된다. 높이 3.4m, 무게 1660kg이며 정교하게 움직일 수 있는 길이 3m의 손가락 두 개를 갖고 있다. 언뜻 보기에 ‘얼굴 없는 흉상’처럼 생겼다.
각 손가락은 7개의 마디로 구성돼 있다. 손가락의 끝에는 흑백 카메라와 조명, 그리고 잡고 있는 물체로 동력을 공급하거나 데이터를 송수신할 수 있는 소켓이 설치돼 있다. 로봇 손은 각종 공구를 장착해 물체를 조립할 수 있으며 인공위성 같은 물체를 궤도에 진입시키는 정교한 일을 한다. SPDM의 아래 부분에는 다양한 공구가 저장돼 있고, 칼라 카메라가 달려있다. 앞으로 SPDM은 우주정거장이 완성될 때까지 각종 모듈을 조립하며 활약할 예정이다.
로봇 팔을 만드는 일은 간단치 않다. 로봇 팔로 물체를 조립하려면 정밀한 움직임이 필수다. 우주에는 태양복사, 방사능, 극세 먼지 등이 있어 로봇의 정확한 작동을 방해할 수 있다. 또 심할 경우 로봇 팔 자체가 파괴되기도 한다. 따라서 로봇 팔을 제작할 때부터 철저한 내구성 시험을 통과해야 한다.
또 지상의 로봇 팔의 움직임과 다른 프로그램이 필요하다. 예를 들어 지상에서는 중력이 작용하기 때문에 로봇 팔을 위로 움직일 때와 아래로 움직일 때 각각 다른 크기의 힘이 필요하다. 그러나 우주에는 중력이 작용하지 않으므로 어느 방향이던 똑같은 힘이 든다. 대신 ISS가 지상처럼 고정돼 있지 않기 때문에 물체를 움직일 때 작용ㆍ반작용을 고려해야 한다. 지상에서 검증할 수 없기 때문에 개발단계부터 철저하게 컴퓨터 시뮬레이션을 해 프로그램을 만든다.
미래에는 로봇이 점점 더 인간과 흡사하게 발전할 것이다. 행성으로 보내는 우주로봇은 한번 임무가 주어지면 특별한 명령 없이 환경변화를 스스로 감지하고 판단하도록 발전할 것이다. 또 조립이나 고장 수리를 위해 사용되는 로봇 팔의 움직임은 더욱 정교해질 것이다. 단순한 우주로봇의 시대를 넘어서 사람과 거의 동등한 임무를 수행하는 로봇우주인(Robonaut, robot+astronaut)이 우주를 탐험하게 될 날도 멀지 않았다. (글 : 이창진 건국대 항공우주공학과 교수)
우주로봇이라고 하면 화성 표면을 탐사하는 스피릿(Spirit)과 오퍼튜니티(Opportunity) 같은 탐사로봇이 떠오를 것이다. 하지만 이에 못지않게 큰 역할을 담당하는 우주로봇이 있으니 바로 로봇 팔이다. 사람이 직접 하기에 위험한 일을 처리해 내는 로봇 팔에 대해 알아보자.
우주에서 로봇 팔을 처음 사용한 시기는 1981년으로 거슬러 올라간다. 로봇 팔은 무거운 물체를 들어 올리거나 우주선에 발생한 고장을 수리하기 위해 우주왕복선 콜롬비아호에 처음 장착됐다. 캐나다에서 제작돼 ‘캐나담(CANADARM)’이라는 이름이 붙여졌다.
허블망원경을 수리하는 프로젝트로 캐나담은 일약 스타가 됐다. 콜롬비아호는 수명이 다해가는 허블망원경에 접근해 캐나담으로 허블망원경을 붙잡은 뒤 고정시켰다. 우주인들은 우주유영을 통해 허블망원경의 카메라를 교체해 시야 2배, 선명도 2배, 감광도 5배 뛰어난 성능을 발휘하도록 업그레이드했다. 허블망원경의 심장부인 전력통제장치도 교체했고, 낡은 태양전지판도 새것으로 교체했다.
캐나담은 인공위성을 수리하는 역할도 담당했다. 1985년 우주왕복선에서 우주로 방출된 인공위성이 잘못된 궤도로 진입했다. 로켓을 작동시키는 스위치가 켜지지 않았기 때문이었다. 콜롬비아호는 로봇 팔로 인공위성을 회수해 고장을 수리한 뒤 정상 궤도에 진입시켰다. 캐나담의 활약 덕에 인공위성이 살아난 것이다.
우주왕복선 자체의 결함을 발견할 때도 캐나담의 활약은 돋보였다. 1984년 우주왕복선이 12번째 우주비행을 했을 때 밑바닥에 설치된 환기구 구멍에 얼음이 붙어있는 것을 발견했다. 대기권에 진입할 때 이 부분이 떨어진다면 안전에 심각한 문제를 일으킬 수 있어 얼음을 제거해야 했다. 로봇 팔로 이 부분을 살살 두드려 얼음을 제거했다.
자체 결함을 수리하는데 로봇 팔의 효용성이 입증되자 2003년 콜롬비아호 폭발 사고 이후에는 로봇 팔 길이를 150cm 연장했다. 끝부분에 카메라와 머리카락정도의 물체도 식별할 수 있는 매우 정교한 레이저 측정 장비도 부착해 지구에 귀환하기 전 의무적으로 왕복선 밑바닥을 검색하도록 했다(그림01). 하지만 ‘손’에 해당하는 부위가 없어 정교한 작업을 하려면 우주인이 로봇팔의 끝에 매달려 우주유영을 해야 했다(그림02).
한편 국제우주정거장(ISS)에는 우주왕복선의 로봇 팔보다 기술적으로 더 향상된 로봇 팔이 설치돼 있다(그림03). 2001년에 설치된 이 로봇 팔은 길이 17.6m, 무게 1800kg에 이르는 거대한 팔이다. ISS의 트러스를 레일 삼아 움직이면서 최대 100톤의 물체를 조작할 수 있다.
ISS의 로봇 팔은 크게 세 부분으로 나뉜다. 트러스와 고정돼 로봇 팔을 이동시키는 ‘MBS’(Moving Base System, 그림05), 팔에 해당하는 ‘캐나담2(CANADARM2)’, 손에 해당하는 ‘SPDM’(Special Purpose Dexterous Manipulator, 그림04)이 그것이다. 이중 SPDM은 가장 최근에 결합됐다. 3월 11일 우주왕복선 엔데버호는 로봇 팔의 마지막 부분인 SPDM를 싣고 우주로 올랐다.
이번에 설치된 SPDM은 거대한 로봇 팔에서 손 역할을 하게 된다. 높이 3.4m, 무게 1660kg이며 정교하게 움직일 수 있는 길이 3m의 손가락 두 개를 갖고 있다. 언뜻 보기에 ‘얼굴 없는 흉상’처럼 생겼다.
각 손가락은 7개의 마디로 구성돼 있다. 손가락의 끝에는 흑백 카메라와 조명, 그리고 잡고 있는 물체로 동력을 공급하거나 데이터를 송수신할 수 있는 소켓이 설치돼 있다. 로봇 손은 각종 공구를 장착해 물체를 조립할 수 있으며 인공위성 같은 물체를 궤도에 진입시키는 정교한 일을 한다. SPDM의 아래 부분에는 다양한 공구가 저장돼 있고, 칼라 카메라가 달려있다. 앞으로 SPDM은 우주정거장이 완성될 때까지 각종 모듈을 조립하며 활약할 예정이다.
로봇 팔을 만드는 일은 간단치 않다. 로봇 팔로 물체를 조립하려면 정밀한 움직임이 필수다. 우주에는 태양복사, 방사능, 극세 먼지 등이 있어 로봇의 정확한 작동을 방해할 수 있다. 또 심할 경우 로봇 팔 자체가 파괴되기도 한다. 따라서 로봇 팔을 제작할 때부터 철저한 내구성 시험을 통과해야 한다.
또 지상의 로봇 팔의 움직임과 다른 프로그램이 필요하다. 예를 들어 지상에서는 중력이 작용하기 때문에 로봇 팔을 위로 움직일 때와 아래로 움직일 때 각각 다른 크기의 힘이 필요하다. 그러나 우주에는 중력이 작용하지 않으므로 어느 방향이던 똑같은 힘이 든다. 대신 ISS가 지상처럼 고정돼 있지 않기 때문에 물체를 움직일 때 작용ㆍ반작용을 고려해야 한다. 지상에서 검증할 수 없기 때문에 개발단계부터 철저하게 컴퓨터 시뮬레이션을 해 프로그램을 만든다.
미래에는 로봇이 점점 더 인간과 흡사하게 발전할 것이다. 행성으로 보내는 우주로봇은 한번 임무가 주어지면 특별한 명령 없이 환경변화를 스스로 감지하고 판단하도록 발전할 것이다. 또 조립이나 고장 수리를 위해 사용되는 로봇 팔의 움직임은 더욱 정교해질 것이다. 단순한 우주로봇의 시대를 넘어서 사람과 거의 동등한 임무를 수행하는 로봇우주인(Robonaut, robot+astronaut)이 우주를 탐험하게 될 날도 멀지 않았다. (글 : 이창진 건국대 항공우주공학과 교수)
추천 콘텐츠
인기 스토리
-
- 저주파 자극기, 계속 써도 괜찮을까?
- 최근 목이나 어깨, 허리 등에 부착해 사용하는 저주파 자극기가 인기다. 물리치료실이 아니라 가정에서 손쉽게 쓸 수 있도록 작고 가벼울 뿐만 아니라 배터리 충전으로 반나절 넘게 작동한다. 게다가 가격도 저렴하다. SNS를 타고 효과가 좋다는 입소문을 퍼지면서 판매량도 늘고 있다. 저주파 자극기는 전기근육자극(Electrical Muscle Stimu...
-
- 우리 얼굴에 벌레가 산다? 모낭충의 비밀스러운 삶
- 썩 유쾌한 얘기는 아니지만, 우리 피부에는 세균 같은 각종 미생물 외에도 작은 진드기가 살고 있다. 바로 모낭충이다. 모낭충은 인간의 피부에 살면서 번식하고, 세대를 이어 간다. 태어난 지 며칠 되지 않은 신생아를 제외한 거의 모든 사람의 피부에 모낭충이 산다. 인간의 피부에 사는 모낭충은 크게 두 종류가 있다. 하나는 주로 얼굴의 모낭에 사는...
-
- [과학향기 Story] 차 한 잔에 중금속이 줄었다? 찻잎의 숨겨진 능력!
- 하루하루 바쁘게 사는 현대인들은 잠을 깨우기 위해 커피를 마신다. 이에 커피 소비량이 급격히 늘어나고 있지만, 아직 커피의 소비량은 ‘차(茶)’의 소비량을 뛰어넘지 못했다. 이는 많은 국가에서 차를 일상적으로 소비하는 문화가 자리 잡고 있기 때문이다. 또한 카페인 외에도 다양한 성분이 함유돼 있어, 건강을 목적으로 섭취하는 사람들도 다수 존재한다. ...
이 주제의 다른 글
- [과학향기 Story] 우주를 102가지 색으로 그려낼 스피어엑스
- [과학향기 Story] 어디서든 인터넷을 쓸 수 있다…스타링크, 한국 통신 시장 뒤엎나
- [과학향기Story] 칠흑같이 깜깜한 우주…그래서 얼마나 어두운데?
- [과학향기 Story] 보조배터리, 이젠 안녕! 호주머니에 넣고 충전하는 시대가 온다?
- [과학향기 for Kids] 소행성으로 우주 식량을 만든다? 미래 우주 식량
- [과학향기 for Kids] 지구 밖에도 생명체가 있을까? 유로파 탐사선 출발!
- [과학향기 Story] 스페이스X 스타십, 집으로 돌아와 주차까지 완료!
- [과학향기 Story] 계단 오르고 장애물 넘는다?… 자유자재로 변하는 모핑 휠 등장
- [과학향기 for Kids] 지구에도 아름다운 고리가 있었다?
- [과학향기 Story] 우리은하보다 230배 큰 블랙홀 제트가 발견되다!


TV에서만 보던 저 팔을 이렇게 자세히 설명들을 수 있는 날이 올지 몰랐네요. 재미있게 잘 읽었습니다~!
2009-04-09
답글 0
.
2009-03-13
답글 0
로봇팔 저렴해지면 나도 하나 장만하고 싶어요!!!
2008-07-14
답글 0
끝에서 둘째문단 끝에서 둘째줄 어느 방향이던-어느 방향이든이라고 해야돼요.
2008-03-28
답글 0
잘읽었습니다^ㅡ^
2008-03-23
답글 0
xtujxtrjtrj
2008-03-20
답글 0
역시 나야
2008-03-20
답글 0
hrthet
2008-03-20
답글 0
ㅔㅐ라ㅓㅐㅓㄴ아ㅣ;헌댛
2008-03-20
답글 0
ㅜㅡㅡㅡㅡ
2008-03-20
답글 0
재미있네요~
2008-03-18
답글 0
1등이네...
2008-03-17
답글 0